如今,工业机器人已在许多生产现场用于焊接、装配、电路板安装和码垛等工序,成为我们生活中不可或缺的一部分。
近年来,对能够与生产现场的工人合作并在人无法进入的特殊/危险环境中工作的机器人的需求不断增加。对于这类机器人来说,机器人末端效应器(机器人手)是必不可少的。奥比睿开发出了一种具有新概念的机器人手,它具有类似人类的灵巧性、去电锁定和高功率输出。为了使机器手具有像人手一样的灵活性,它需要有多个运动自由度,这就要求在手指和手掌上设置许多致动器机构。此外,微型化也是一个重要因素,因为诸如使用工具等动作要求机器手像人的手一样小。为了在机器人手指的狭小空间内设置致动器机构,电机和滚珠丝杠被平行设置,手指被设计成可以弯曲和伸展,电机运动通过滚珠丝杠和链接传递,从而使机器人手的尺寸得以缩小。
现有的机器手需要持续的大电流输入才能保持对物体的抓握。与此相反,我们的专利无电锁定系统 "dyNALOX"安装在机器手的每个关节上,使手指在电流输入关闭后仍能保持其位置。这种独特的锁定功能有助于最大限度地减少电机的耗电量和发热量。
在突然停电、传输电缆故障或电池出现问题的情况下,机器手仍然可以在没有通电的情况下握住物体,从而保证了机器手的绝对握持可靠性。
实际应用的一个例子是防灾机器人,它们需要在户外工作,并使用电池作为主要电源。低功耗电机可延长整个系统的运行时间。此外,独特的锁定功能可使机器人在电源中断的情况下仍能保持对物体的抓握,从而增强了机器人在紧急情况下的 "韧性"。

图1: 3指机器手外观
- dyNALOX
- 登録特許
- 特許第6142204 号
特許第5942128 号
US9,316,288
US9,618,061
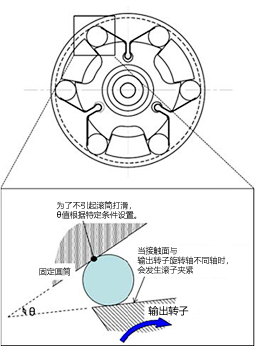
图2: 无通电LOCK动作原理
多指机器手

图3: 多指机器手外观
Orbray 与岐阜大学合作,为由内阁府和科学、技术和创新委员会领导的创新研究与发展促进计划(简称 ImPACT )开发了灵活且高功率的机器人手。它有望取代灾难现场和工厂维护现场等危险环境中的人类工作。
虽然这只手体积较小,最大长度为308毫米、2450克,但它有4个手指、16个关节、12个自由度,指尖处有150N的高输出,并且能够以600N的力量在不通电的情况下握住物体。
小型 / 高输出 / 低电流消耗

